
- 计量实验室,
- 检查和监控
- Quadrotor无人机
- CLICKMOX
- 必威体育app官方下载
- 目录
- 新闻和趋势
- 展览
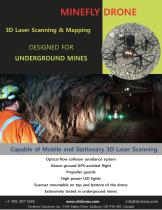
Quadrotor无人机MineFly
平民
为地下采矿
检查


添加到收藏夹”
这种产品比较
特征
- 类型
- quadrotor
- 应用程序
- 民用,用于地下开采、检查、仪器、测绘、观测
- 其他特征
- 自主,轻便,带有热感摄像机
- 耐力
-
30分钟
描述
MineFly是一个完整的基于无人机的3D激光扫描和测绘系统,专门为gps匮乏的地区设计,如地下矿山和建筑内部。这架无人机小巧轻便,配备了3D激光扫描仪、充足的LED照明、声纳传感器、一个高清摄像机和几个低分辨率摄像机。这些特点使MineFly无人机能够满足井下测绘和测量的挑战性要求。该系统采用同步定位与测绘(SLAM)算法,将二维激光扫描数据与激光传感器位置相结合,生成精确的三维点云。MineFly无人机能够通过实时或离线地图生成快速获取3D点云数据。机载防撞系统帮助操作人员通过难以进入和狭窄的开口。3D地图基于Clickmox Solution的专有软件,无需任何外部定位系统,即可生成精确的点云。系统从点云生成三维地图。地图生成过程可以根据用户的喜好实时或离线完成。在实时处理过程中,还可以计算出无人机的位置,用于自主作业。
视频
目录
MineFly无人机
1
页面




0/10的必威体育app官方下载乘积比较