- Robótica - Automação - Informática
- 软件工业
- 软件de设计
- 的MathWorks
软件de证人机器人系统工具箱™
德设计
Para aplicações de robótica








Guardar nos Favoritos
Comparar
Caracteristicas
- Funcao
- 有品位,就有设计
- Aplicacoes
- Para aplicações de robótica
Descricao
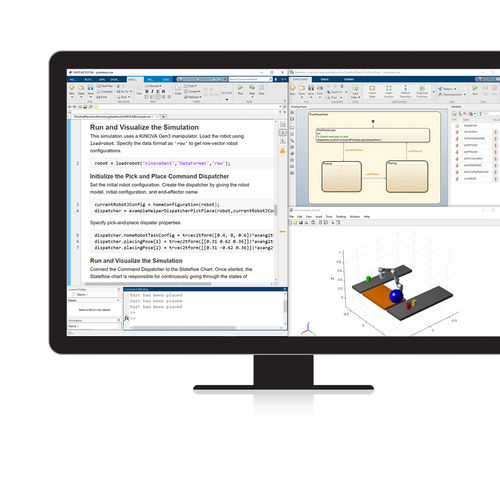
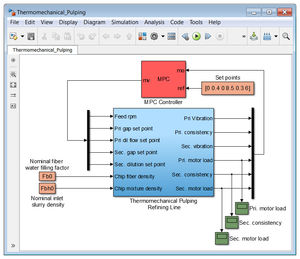
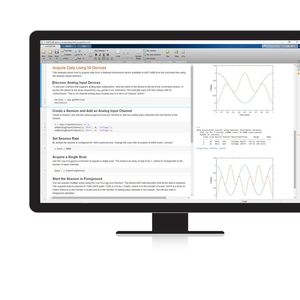
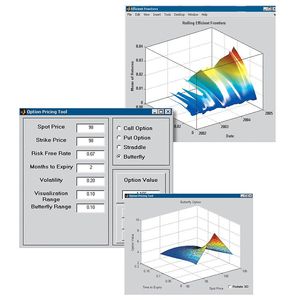
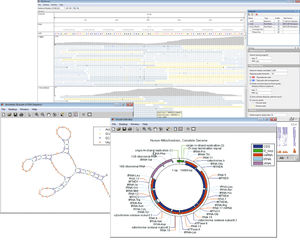
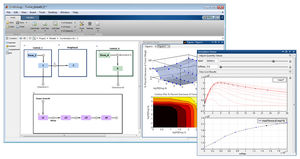
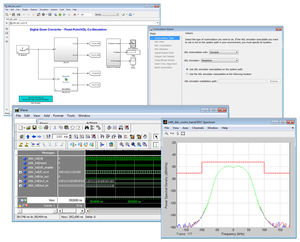
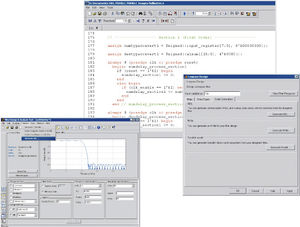
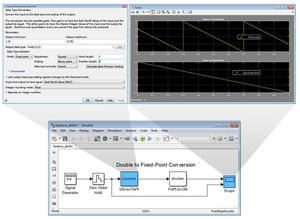
机器人系统工具箱™fornece ferramenta e algoritmos para projetar, simular e teststar manipuladores, robôs móveis e robôs humanóides。Para manipuladores e robôs humanóides, a caixa de ferramenta as inclui algoritmos Para verificação de colisão, geração de trajetória, cinemática额e inversa e dinâmica usando uma representação rígida em árvore do corpo。Para robôs móveis, a caixa de ferramenta as inclui algoritmos Para mapeamento, localização, planejamento de trajetórias, a ompanhamento de trajetórias e control de movimentos。A caixa de ferramenta forcesemployment de referência de aplicações comunde robôs industriais。Ela também inclui uma biblioteca de modelos de robôs industriais disponíveis comercialmente, que você pode importar,可视化类似。Você pode desenvolver um protótipo de robô functional, combinando os modelos cinemáticos e dinâmicos fornecidos。一个ferramentas caixa de ferramentas允许- suas aplicações robotizadas, ligando-se directamente ao simulador robótico Gazebo的共同相似物。验证项目硬件,você pode se conectar平台robóticas gerar e implementar código (com MATLAB Coder™ou Simulink Coder™)。
---
视频
的专业
Não estão disponíveis catálogos para este producto。
Ver todos os catálogos da The MathWorks













* Os preços não incluem impostos, transporte, taxas alfandegárias, nem custom adicionais associados às opções de instalação e de ativação do serviço。Os preços são meramente indicativos e podem variar em função dos países, do custo as matérias-primas e taxas de câmbio。
0/10的乘积是相似的